This New Robot Could Be The Next Step In Replacing Humans For Manual Labor

How many robots does it take to screw in a lightbulb? If you go by the robotic arms currently on the market, the answer is zero. To date, robotic appendages have lacked the dexterity to conduct complex, delicate actions. Particularly when handling delicate materials. Such limitations have been a godsend for manual labor advocates hoping to keep full-scale automation at arm's length. However, a new robotic arm from startup Eka could give researchers a solution to one of the most intransigent questions in robotics, and pave the way for untold scales of industrial automation.
Based in Cambridge, Massachusetts, Eka is bringing a unique approach to robotics' dexterity conundrum. Founded by MIT professor Pulkit Agrawal and ex Google DeepMind researcher Tuomas Haarnoja, the company takes a unique approach to teaching its AI systems to execute complex movements. Deploying what its executives call a Vision Force Action learning model, or VFA, Agrawal claims that Eka's AI system could create "a new foundation uniting performance, generality, and safety for putting capable robots in everyone's hands."
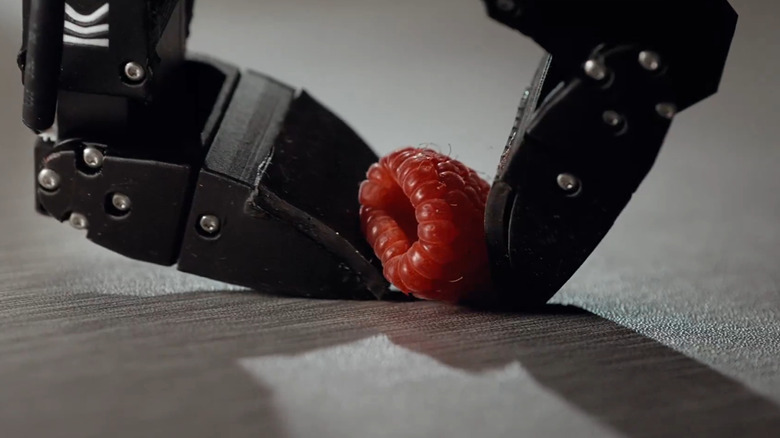
A recent report by Wired's Will Knight attests to this potential. In showcasing how Eka's robotic arm executes complex tasks, ranging from handling keys to sorting chicken nuggets, the report could prove prophetic for a rapidly changing industrial landscape. Already, AI-powered robotics are revolutionizing manual labor, particularly in China, where robots are often seen executing tasks alongside workers in industrial farms and factories. Some advancements have given rise to dark factories, where products like smartphones can be built around the clock without human workers. Despite these changes, however, dexterous tasks have remained beyond reach. Unfortunately for global labor markets, a robot capable of handling raspberries might change that.
Tackling the dexterity problem

Developers typically train autonomous robots using vision-language-action (VLA) models. Similar to training large language models, VLAs feed AI systems mass amounts of visual information until they learn to replicate it. But this approach has distinct setbacks. For instance, what happens if something unexpected occurs?
To illustrate, pick up a piece of fruit and think of the endless variations that action could entail. Strawberries, for instance, come in different, shapes, sizes, and ripeness levels. They could be wet, placed at odd angles, or mushy. Natural laws of force, gravity, and inertia amplify these problems. How does a robotic hand adjust to a malformed berry? What happens if it slips or falls? The answer is more data. But to obtain it, researchers must tackle the gargantuan task of feeding their models videos testifying to the endless ways in which one picks up a berry. Thus the robot-dexterity-problem is rooted in the most basic fact of our existence: the endless variations of our natural world.
However, Eka is taking a different approach. In training their robotic appendage, the startup utilizes a vision force action model, in which an AI model runs through thousands of hours of simulations that force the system to solve these problems directly. Eka's VFA simulations include principles of nature like mass and inertia to teach the robotic system how such forces act upon the objects its handling. In his report, Knight likened such a system to those powering Google's Alpha Zero program, which infamously discovered novel chess strategies. Unfortunately, the duo is strategically mum regarding how they translate such simulations to the real world, a hurdle known as the sim-to-real-gap in robotics. However, the proof is in the pudding. Or, in Eka's case, chicken nuggets.
Dexterity or doom?
To test Eka's robotic hands, Knight presented a series of objects for it to retrieve, including earplugs, a hairbrush, and keys. Although Knight acknowledges that the robot often takes "a few nips" to accomplish its task, the hand eventually completed its tasks through a set of custom pinchers that give the robot sense of feel. Company videos testify to Knight's reporting, showing the robot screw in light bulbs and retrieving a strawberry from a model's open palm.
In one example, Knight watched as Eka sorted a table of scattered chicken nuggets into a moving conveyor belt of containers, showcasing improvisational skills typically lacking in industrial robotics. Although mundane, these examples are significant. As Knight points out, handling food is largely done by human operators due to its delicate composition. Incredibly, chicken nuggets could be a precursor to mass industrial automation. According to Wired, Eka believes it's "halfway there." Now it's a question of scale.
Inevitably, such advancements must be framed within the context of mass job displacement. According to a 2026 Goldman Sachs report, roughly 300 million jobs are exposed to AI automation. Meanwhile, the World Economic Forum reported that 58% of employers believe that advancements in robotics and automation will transform their businesses by 2030. And although Eka touts its robots as executing "mastery alongside humans," its founders' language attests to the technology's adverse economic consequences. For instance, Agrawal told Wired that the "biggest problem in the world to be solved" was that "trillions of dollars flow through the human hand." Although the professor likely didn't mean this literally, his technology undeniably has the potential to snatch said money directly from workers' fingertips. Eka has yet to state whether its next biggest "problem" is the upcoming claw-sized hole in workers' wallets.